ACTIVIDAD 2
TRABAJO INDIVIDUAL / COLABORATIVA
Luis A. Sanchez - Cód.: 16.786.134
Héctor Fabio Acevedo – Cód.:
Gonzalo Andrés Nino – Cód.:
Jorge Alexander Celades –Cód.:
Carlos Arturo Cardona – Cód.: 18415051
Instructores:
Noel Jair Zambrano
Edgar Rodrigo Enríquez Rosero
Grupo Colaborativo:
309696-21
Universidad Nacional Abierta y a Distancia – UNAD.
Programa: Ingeniería Electrónica
Cead: Palmira- Valle- Colombia
Octubre – 2016
INTRODUCCION
El curso de Ingeniería de Microprocesadores y micro controladores de la Universidad UNAD en el segundo semestre académico del 2016, es relevante como propósito fundamental la formación sólida del pensamiento científico – tecnológico manifestado en la capacidad para representar la información que contienen y de esta manera poder modelar matemáticamente un sistema con el fin de estudiarlo, aportar nuevo conocimiento y/o mejorar el conocimiento existente en los diversos campos de la ciencia.
Para lograr los fines de aprendizaje de toda la temática del curso, se debe desarrollar las actividades solicitadas de la estrategia, hacer aportes permanentes y asumir una mayor responsabilidad de su propio aprendizaje, así como aplicar las habilidades y conocimientos adquiridos en su formación. Las herramientas básicas de software para el análisis y diseño de sistemas. El curso ofrece simulaciones prácticas para la exploración a fondo de los conceptos analizados en la parte teórica.
Diseño e implementación de tres soluciones con micro controladores Pic 16f84 o Pic16f628. Utilizando el programa Mplab IDE Versión 8.92 lenguaje asembler para la elaboración de los programas respectivos. Simulado en programa Proteus 7.9 o Versiones 8.0 en adelante.
OBJETIVOS
Generales
- Realizar la guía de actividades de la unidad 1 que implica el Diseño e implementación de tres soluciones con micro controladores Pic 16f84 o Pic16f628.
Específicos
- Encendido y apagado de un LED con intermitencia de aproximadamente 2 segundos
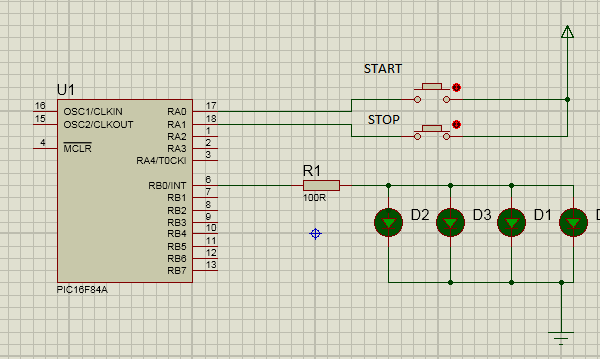
- Encendido de un LED por acción sobre un pulsador se mantenga encendido y se apague por la acción de otro pulsador.
- Implementación de al menos 8 secuencias diferentes sobre ocho (8) LEDs controladas en selección por dos pulsadores, uno para seleccionar la secuencia siguiente y otro para seleccionar la secuencia anterior
- Escoger una de las 5 Propuestas de tipo grupal para el desarrollo del proyecto final del curso de micro controladores que dé una solución a un problema industrial Las cuales deben investigar para su desarrollo: 1-Control de una caldera, 2-Sistema de control de triturado de roca, 3-Sistema de secamiento de arroz, 4- Control de un sistema de destilación, 5-sistema de control de tanques de crudo más bombeo. Donde implique el control realimentado de: -Mínimo 3 variables (temperatura, nivel, humedad, presión, flujo, peso, luz, sonido, vacío, variables eléctricas, etc.) El cual debe ser aprobado y socializado por todo el equipo en el informe del trabajo colaborativo N1) -Debe desarrollarse en lenguaje de alto nivel (sea lenguaje C o lenguaje Basic). Debe tener un sistema de indicación (display), -Debe tener un sistema de mandos (entradas) por código, swichs, pulsadores, etc.
- Debe tener un sistema de sensores asociados a las variables escogidas, mínimo (3)
- Debe tener un sistema de actuadores (salidas) controlados por el Microcontrolador (bobinas, motores dc, servomotores, etc.) que cumplan la función de control.
- Debe tener control de parada de emergencia.
- Puede desarrollarse en sistema Microcontrolador Arduino o Microcontrolador Pic( 16f877a)
- Debe de desarrollarse de manera física y simulada.
DESARROLLO
1- Encendido y apagado de un LED con intermitencia de aproximadamente 2 segundos
Programa Asm
|
Programa C
|
Proteus
|
LIST p=16f84A
include <p16f84a.inc>
__CONFIG _CP_OFF&_PWRTE_ON&_XT_OSC
TIEMPO
EQU 0X0C
org 0
bsf STATUS,RP0
clrf PORTB
bcf STATUS, RP0
INICIO
BCF PORTB,0
CALL
RETARDO
CALL
RETARDO
BSF PORTB,0
CALL RETARDO
GOTO INICIO
RETARDO
MOVLW D'255'
MOVWF TIEMPO
DEC
DECFSZ TIEMPO
GOTO
DEC
RETURN
END
|
#include
<16f628a.h>
#fuses
XT,NOWDT,NOPROTECT,PUT
#use
delay (clock=4000000)
#use
fast_io(b)
void
main(void)
{
set_tris_b(0xFD);
disable_interrupts(GLOBAL);
output_low(PIN_B1);
do{
if(input(PIN_B0)){
output_high(PIN_B1);
delay_ms(2000);
output_low(PIN_B1);
}
}while(TRUE);
}
|
 |
2- Encendido
de un LED por acción sobre un pulsador se mantenga encendido y se apague por la
acción de otro pulsador.
Programa Asm
|
Programa C
|
Proteus
|
LIST p=16f84A
include <p16f84a.inc>
__CONFIG
_CP_OFF&_PWRTE_ON&_XT_OSC
TIEMPO EQU 0X0C
ORG 0
BSF STATUS,RP0
BSF PORTA,0
BSF PORTA,1
BCF PORTB,0
BCF STATUS, RP0
PULS1
BTFSS PORTA,0
GOTO PULS1
BSF PORTB,0
BCF PORTA,0
GOTO PULS2
PULS2
BTFSS PORTA,1
GOTO PULS2
BCF PORTB,0
BCF PORTA,1
GOTO PULS1
END
|
#include <16f628a.h>
#fuses XT,NOWDT,NOPROTECT,PUT
#use delay (clock=4000000)
#use fast_io(b)
void main(void)
{
set_tris_b(0xFB);
disable_interrupts(GLOBAL);
output_low(PIN_B2);
do{
if(input(PIN_B0)){
output_high(PIN_B2);
delay_ms(100);
}
if(input(PIN_B1)){
output_low(PIN_B2);
delay_ms(100);
}
}while(TRUE);
}
|
 |
3-
Implementación de al menos 8 secuencias diferentes sobre ocho (8) LEDs controladas
en selección por dos pulsadores, uno para seleccionar la secuencia siguiente y
otro para seleccionar la secuencia anterior
Proteus secuencias
|
Proteus seq
|
  |
  |
C ++
|
Asm Assembler
|
# include<16f84a.h>
# device adc=100
# device *=16
#fuses xt
void main()
{
int1 a,b,d; int n,m=0,T=4;
while (true) {
a=input_state(pin_a2);b=input_state(pin_a3);
if ((a==1)&& (T<8)) T=T+1;
if ((b==1)&& (T>0)) T=T-1;
if (T==1) { for(n=1;n<=3;n++) {
output_high(pin_B0);output_high(pin_B1);
output_high(pin_B2);output_high(pin_B3);
output_high(pin_B4);output_high(pin_B5);
output_high(pin_B6);output_high(pin_B7);
output_low(pin_B0);output_low(pin_B2);
output_low(pin_B4);output_low(pin_B6);
} }
ELSE if (T==2) { for(n=1;n<=3;n++)
{
output_low(pin_B0);output_low(pin_B1);
output_low(pin_B2);output_low(pin_B3);
output_low(pin_B4);output_low(pin_B5);
output_low(pin_B6);output_low(pin_B7);
output_high(pin_B1);output_high(pin_B3);
output_high(pin_B5);output_high(pin_B7);
} }
ELSE if (T==3) { for(n=1;n<=3;n++)
{
output_low(pin_B0);output_low(pin_B1);
output_low(pin_B2);output_low(pin_B3);
output_low(pin_B4);output_low(pin_B5);
output_low(pin_B6);output_low(pin_B7);
output_high(pin_B0);output_high(pin_B2);
output_high(pin_B4);output_high(pin_B6);
} }
ELSE if (T==4) { for(n=1;n<=3;n++){
output_low(pin_B0);output_low(pin_B1);
output_low(pin_B2);output_low(pin_B3);
output_low(pin_B4);output_low(pin_B5);
output_low(pin_B6);output_low(pin_B7);
output_high(pin_B0);output_high(pin_B1);
output_high(pin_B2);output_high(pin_B3);
} }
ELSE if (T==5) { for(n=1;n<=3;n++){
output_low(pin_B0);output_low(pin_B1);
output_low(pin_B2);output_low(pin_B3);
output_low(pin_B4);output_low(pin_B5);
output_low(pin_B6);output_low(pin_B7);
output_high(pin_B4);output_high(pin_B5);
output_high(pin_B6);output_high(pin_B7);
} }
ELSE if (T==6) { for(n=1;n<=3;n++){
output_low(pin_B0);output_low(pin_B1);
output_low(pin_B2);output_low(pin_B3);
output_low(pin_B4);output_low(pin_B5);
output_low(pin_B6);output_low(pin_B7);
output_high(pin_B0);output_high(pin_B1);
output_high(pin_B6);output_high(pin_B7);
}}
ELSE if (T==7) { for(n=1;n<=3;n++){
output_low(pin_B0);output_low(pin_B1);
output_low(pin_B2);output_low(pin_B3);
output_low(pin_B4);output_low(pin_B5);
output_low(pin_B6);output_low(pin_B7);
output_high(pin_B2);output_high(pin_B3);
output_high(pin_B4);output_high(pin_B5);
} }
ELSE if (T=8) { for(n=1;n<=3;n++){
output_low(pin_B0);output_low(pin_B1);
output_low(pin_B2);output_low(pin_B3);
output_low(pin_B4);output_low(pin_B5);
output_low(pin_B6);output_low(pin_B7);
output_high(pin_B0);output_high(pin_B1);
output_high(pin_B2);output_high(pin_B3);
output_low(pin_B0);output_low(pin_B1);
output_low(pin_B2);output_low(pin_B3);
output_high(pin_B4);output_high(pin_B5);
output_high(pin_B6);output_high(pin_B7);
} }
} }
|
0000:
SUBWF A,W
NOP
XORWF 4,W
BSF 3,4
XORWF 13,W
SUBWF 14,W
L000C
L000F
RETLW 14
L0015
BTFSS 14,4
L001B
RETLW 94
L001C
INCF 14,W
GOTO L0014
SUBWF 12,W
RETLW 12
L0026
L004D
L0052
L0058
GOTO L0092
RETLW 14
SUBWF 12,W
RETLW 12
L008A
L008F
L0092
L0095
GOTO L0092
RETLW 14
SUBWF 12,W
RETLW 12
L00C7
L00CC
GOTO L0092
RETLW 14
L00D8
SUBWF 12,W
RETLW 12
L00DE
GOTO
L0092
RETLW
14
L0114
SUBWF
12,W
RETLW 12
GOTO L0092
RETLW 14
SUBWF 12,W
RETLW 12
GOTO L0092
RETLW 14
SUBWF 12,W
RETLW 12
GOTO L0092
SUBWF 14,W
RETLW 94
SUBWF 12,W
RETLW 12
GOTO L0292
L0225
CLRF 3
2007:
3FF1
|
Control de una caldera en forma
automática
INTRODUCCION
Una caldera Es un recipiente hecho
de metal el cual sirve para calentar agua u otro tipo de líquido, ya sea para
pasarlo de un estado a otro, para producir calefacción en algún ambiente o
inclusive para generar energía a través de la presión del vapor. La estructura
de una caldera puede variar dependiendo el propósito sin embargo a continuación
se dará a conocer componentes más comunes de la estructura:
v Quemador: Quema combustible
v Hogar: Realiza la combustión del
combustible utilizado y la generación de los gases calientes.
v Tubos de intercambio de calor:
Intercambio calor con otras superficies, como por ejemplo calentamiento de
agua.
v Separador liquido – vapor
v Chimenea: Escape de gases generados
por el efecto de la combustión.
v Carcasa: Es la que contiene el hogar
y sistema de tubos de intercambio.
v Componentes o accesorios de trabajo,
supervisión y seguridad para una caldera:
Ø Quemadores
Ø Vaso de expansión
Ø Termostatos
Ø Válvula de seguridad
Ø Llaves de paso y regulación
v Accesorios de observación:
Ø Tubos de nivel
Ø Grifos de prueba
Ø Manómetros
Ø Termómetros
Ø Analizadores de gases
v Accesorios de alimentación de combustible:
Ø Grupo de presión de combustible
Ø Línea de alimentación de gas
Ø Quemadores para combustibles
líquidos y gaseosos.
Ø Quemadores mecánicos para
combustibles sólidos.
Ø Elementos manuales
v Accesorios de limpieza:
Ø Registros o tapas de limpieza
Ø Válvulas de purga
Ø Estanque de retención de purgas

El control de un sistema de caldera
es la herramienta mediante la cual se consiguen los equilibrios de masa y de
energía de la misma ante las variaciones en la demanda de los consumidores.
Para ello es necesario monitorear, procesar información y controlar todas las
variables que influyen en el proceso de calentamiento, para el caso concreto
hablaremos de una caldera de gas cuya finalidad es calentar aire a una presión
constante, conforme a ello podemos decir que tenemos un sistema de control de
lazo cerrado; cabe precisar que este tipo de sistemas son de gran aplicación en
diferentes sectores de la industria pasando por el sector textil, lechero,
hasta los procesos de destilación.
La energía y la masa introducidas en
la caldera deben ser reguladas para conseguir las condiciones de salida
deseadas. Las medidas de las variables del proceso darán al sistema la
información necesaria para ello.
En la Figura 1 se muestra mediante
un diagrama de bloques el esquema general del control de una caldera.

Es ahí donde entran a funcionar
sistemas de control inteligentes los cuales requieren procesar información y
dar respuestas en tiempo real, para el caso concreto se pueden emplear desde
uno a varios microprocesadores en pro de regular, procesar, controlar la
información recopilada del medio, la acción de los actuadores.
En el sistema de control de una
caldera, las diferentes variables interaccionan sobre los diferentes
subsistemas. Así, la demanda de carga influirá sobre la temperatura de vapor,
el caudal de agua sobre la presión de vapor que a su vez es la causante de la
demanda de carga. Por lo tanto, todo el sistema debe ser coordinado e
implementado de forma que minimice los efectos de dichas interacciones, puesto
que el propio diseño del sistema las puede aumentar. El presente trabajo implementa
microprocesadores dentro de una tarjeta que en el ámbito del control bien puede
hacer la función de un PLC o RTU, en un modo un poco menos sofisticado el
famoso arduino, no obstante la idea de implementar microprocesadores y por ende
realizar todo el montaje micro electrónico conlleva la aplicación de los temas
vistos no solo en el presente curso sino que también se recala en conocimientos
anteriores.
Propuesta solución 1 PIC 16F877a

PROPUESTA SOLUCION 2- CALDERA CON ARDUINO
Arduino es una placa electrónica desarrollada
con el pensamiento de Hardware de código abierto es decir que se puede comprar,
fabricar, replicar de forma libre, es también llamada una plataforma
experimental donde a través de ella podemos desarrollar un sin número de
proyectos desde pequeños a grandes, teniendo a la mano Arduino nos facilitara
en gran medida el desarrollo, ahorro de tiempo y dinero de cualquier proyecto
que nos propongamos a emprender. Está compuesto principalmente por un micro
controlador que maneja toda la plataforma que tiene entradas y salidas para
manipular una inmensa cantidad de componentes electrónicos:

¿Por qué con Arduino? Arduino es una
plataforma innovadora, muy completa y fácil de conocer, por lo que recomiendo
grandemente el desarrollo del proyecto con Arduino, ya que a diferencia de usar
PIC en Arduino tenemos un micro controlador ya montado en una placa con las
salidas y entradas definidas y fáciles de identificar, además de que nos da salidas
adicionales de 3.3V y 5V para adicionar componentes que se alimenten de esas
salidas de voltaje. Cabe resaltar la gran cantidad de información, tutoriales y
proyectos que se han realizado con Arduino y que ha revolucionado la forma de
ver, practicar y aplicar la electrónica.
Arduino cuenta con su propio IDE de
programación basada en C++ que en mi concepto suele ser más entendible que el
lenguaje ensamblador:

PROYECTO SIMILAR COMO
REFERENCIA
Control electrónico de
caldera de leña con Arduino:

Es un proyecto realizado por Xoel Molejón desde
Gijón, Asturias (Galicia rocks!) un incursionista de Arduino que se ingenió la
forma de automatizar una caldera con combustible sólido (leña) para mejorar el
rendimiento y control de ella con ayuda de sensores, servomotores, relés,
extractores, pantalla lcd y demás componentes electrónicos para regulación o
división de voltajes. Es un proyecto muy bueno y que nos puede guiar, dejo
enlace de la web que hace referencia a ese proyecto por si quieren analizarla.
PLANTEAMIENTO DEL PROBLEMA
El control de una caldera de forma
automática en cualquier industria más allá de uno uso eficiente de la energía
representa un tema de seguridad Industrial, por ello es menester monitorear,
supervisar y controlar todas las variables que confluyen dentro de una caldera
a gas para el caso, de modo que se garantice confiabilidad en las operaciones
que requieren del sistema pero a su vez se minimicen los riesgos en su
operación.
JUSTIFICACIÓN
El presente proyecto es una necesidad que se
cimienta en nuestra obligación como ingenieros de aplicar los conocimientos
trasmitidos, no solo en lo que a microcontroladores se refiere, si no también;
en que la concepción de un control automático para una caldera a gas, implica
la conceptualización y aplicación de conocimientos a priori de múltiples
asignaturas vistas dentro de nuestro proceso de formación.
Por otro lado existe una obligación de buscar
eficiencia y confiabilidad en procesos críticos dentro de una industria, tal es
el caso del control de calderas sin importar cuál sea el material en
combustión, para el caso se ha especificado que es una caldera a gas, para
calentar aire por transferencia de calor, cuyas temperaturas internas depende
de la temperatura a la cual se desee calentar el aire.
CONCLUSIONES
- v Los micro controladores PIC son muy fácil de grabar y programar, solo necesita una computadora. Un PIC se puede grabar mediante diferentes puertos como serie o el USB.
- v La ventaja de un PIC permite controlar, programar y sincronizar tareas electrónicas a través del tiempo simplemente realizando una correcta programación. En el pasado esto no era posible ya que para controlar cada proceso era necesario un circuito muy complicado y específico para cada cosa que se necesite. Con un Microcontrolador PIC, este circuito integrado hace todo.
- v En el mercado existen varios software que ayudan a programar un Microcontrolador de este tipo, como por ejemplo el PICC, o el MPLAB, es decir, que los PIC, están muy extendidos y difundidos en la electrónica actual.
- v Existe una gran diversidad de micro controladores PIC en el mercado de Microchip y ésta también es una gran ventaja, ya que podemos elegir entre diversas características que uno no tiene pero otro si, como cantidad de puertos, cantidad de entradas y salidas, conversor Analógico al Digital, cantidad de memoria, espacio físico, y este tipo de cualidades que nos permiten tener una mejor elección de un PIC.
- v Otra ventaja importante es que los PIC son baratos.
- v Una de las desventajas de un Microcontrolador PIC es que se necesitan llamar a muchas instrucciones para realizar una tarea en particular. Cuando el proyecto sea complejo.
BIBLIOGRAFIA
v
http://www.absorsistem.com/tecnologia/calderas/descripci%C3%B3n-de-calderas-y-generadores-de-vapor
++++++++++++++++++++++========================================
ACTIVIDAD 3
TRABAJO INDIVIDUAL / COLABORATIVA
Luis A. Sanchez - Cód.: 16.786.134
Héctor Fabio Acevedo – Cód.:
Gonzalo Andrés Nino – Cód.:
Jorge Alexander Celades –Cód.:
Carlos Arturo Cardona – Cód.: 18415051
Instructores:
Noel Jair Zambrano
Edgar Rodrigo Enríquez Rosero
Grupo Colaborativo:
309696-21
Universidad Nacional Abierta y a Distancia – UNAD.
Programa: Ingeniería Electrónica
Cead: Palmira- Valle- Colombia
Octubre – 2016
El curso de Ingeniería de Microprocesadores y micro controladores de la Universidad UNAD en el segundo semestre académico del 2016, es relevante como propósito fundamental la formación sólida del pensamiento científico – tecnológico manifestado en la capacidad para representar la información que contienen y de esta manera poder modelar matemáticamente un sistema con el fin de estudiarlo, aportar nuevo conocimiento y/o mejorar el conocimiento existente en los diversos campos de la ciencia.
Para lograr los fines de aprendizaje de toda la temática del curso, se debe desarrollar las actividades solicitadas de la estrategia y leer las lecturas de la unidad 2 , paso a solución a circuitos y avances del proyecto, hacer aportes permanentes y asumir una mayor responsabilidad de su propio aprendizaje, así como aplicar las habilidades y conocimientos adquiridos en su formación. Las herramientas básicas de software para el análisis y diseño de sistemas.
Diseño e implementación de dos soluciones con micro controladores Pic 16f877A. Utilizando los programas PIC C, Micro C, Pic Basic Proton y Pic Simulator Ide, para la elaboración de los programas respectivos. Simulado en programa Proteus 7.9 o Versiones 8.0 en adelante.
OBJETIVOS
Generales
Realizar la
guía de actividades de la unidad 2 que implica el Diseño e implementación de dos
ejercicios con micro controladores Pic 16f877a.
Específicos
v Desarrollar
un circuito Microcontrolador con lenguaje de programación C el cual debe tener
los siguientes elementos: Microcontrolador Pic16f877A, Display 16 X 2, Lm35
(sensor de temperatura), 2 LEDs (rojo, verde), Motor 12 Vdc (ventilador) y
Parlante.
v El
Punto uno es un circuito a desarrollaran en lenguaje C: Debe sensar la
temperatura ambiente y se está menor o igual de 25 grados el Led verde se
encenderá y dará un solo pitido cada 3 segundos, si la temperatura supera los
25 grados hasta los 35 grados El Led rojo se prendera y debe dar una alarma
constante y prenderse el ventilador hasta que baje la temperatura menor o igual
a 25 grados. En el display se debe visualizar el valor de la temperatura y la
activación de motor como MOTOR ON o MOTOR OFF.
v El
ítem 2 es circuito se realizara con el lenguaje de programación Basic: El cual
deberá en un display 16X2 desplegar el nombre del curso, numero de grupo y los
nombres uno por uno de los integrantes del grupo seguido del número de cedula,
los cuales cambiaran al presionar cada uno de los 5 pulsadores (1 al 5 igual
número de integrantes)
v
DESARROLLO
1- Circuito
lenguaje C: Debe sensar la temperatura ambiente y se está menor o igual de 25
grados el Led verde se encenderá y dará un solo pitido cada 3 segundos, si la
temperatura supera los 25 grados hasta los 35 grados El Led rojo se prendera y
debe dar una alarma constante y prenderse el ventilador hasta que baje la
temperatura menor o igual a 25 grados. En el display se debe visualizar el
valor de la temperatura y la activación de motor como MOTOR ON o MOTOR OFF.
Programa C
|
Proteus
|
#
include<16f877.h>
#
device adc=100
#
device *=16
#
use delay (clock=4M)
#include
<lcd.c>
#fuses
xt
Float
Temp;
void
main()
{
//******************
setup_adc_ports
(RA0_ANALOG);//entrada lm35
setup_adc (ADC_CLOCK_INTERNAL);
//***convertidor analógico digital
setup_COUNTERS
(RTCC_internal.rtcc_div_1) ; //marca división para convertidor
set_adc_channel (0);
//****************Inicio del LCD
Lcd_init ();//******inicio lcd
Lcd_gotoxy (1,1);
Printf (lcd_putc,"Micro
controladores");
Lcd_gotoxy (1,2);
Printf (lcd_putc,"Control
Temperatura");
delay_ms(500);
//*******************************
while(true)
{
Temp=
(float)read_adc()/2 -1;// lectura convertidor análogo
lcd_gotoxy
(21,3);
printf
(lcd_putc,"%f",Temp);
lcd_gotoxy(25,3);
printf(lcd_putc,"C");
delay_ms
(300);
//**************Logica
if(Temp<=25)
{
output_low(pin_b0);
//Led Rojo OFF
output_high(pin_b1);
//Led Verde ON
output_low(pin_b2);
//Motor Fan OFF
lcd_gotoxy(26,1);
printf(lcd_putc,"
Normal ");
lcd_gotoxy(29,3);
printf(lcd_putc,"MotorFan
OFF");
output_high(pin_b3);
//buzzer ON
delay_ms(1000);//buzzer
ON 1 seconds
lcd_gotoxy
(29,3); printf(lcd_putc,"
");
delay_ms(300);
lcd_gotoxy
(26,1);
printf(lcd_putc," ");
output_low(pin_b3);
//- BLINK
delay_ms(3000);//buzzer
Off 3 seconds
}
//************Logica alta
if(Temp<=35&&Temp>25)
{
output_high(pin_b0);
//Led Rojo ON
output_low(pin_b1);
//Led Verde OFF
output_high(pin_b2);
//Motor Fan ON
output_low(pin_b3);
// Buzzer OFF
lcd_gotoxy(26,1);
printf(lcd_putc," Alta
");
lcd_gotoxy
(29,3);
printf(lcd_putc,"MotorFan
ON");
delay_ms(500);
lcd_gotoxy
(29,3);
printf(lcd_putc," ");
delay_ms(300);
lcd_gotoxy
(26,1);
printf(lcd_putc," ");
delay_ms(500);
}
}
}
|
 
Youtube link:
|
Programa C
|
Proteus
|
||
#
include<16f877.h>
# device adc=100
# device *=16
# use delay (clock=4M)
#include <lcd.c>
#fuses xt
void main()
{
int1 a,b,c,d,e;//variables
//*****Inicio del LCD *******
Lcd_init ();//******inicio lcd
Lcd_gotoxy (1,1);Printf (lcd_putc,"Micro
controladores");
Lcd_gotoxy
(1,2);Printf (lcd_putc,"Col 2 - Gr:309696_21");
delay_ms(500);
//***********
while(true) {
a=input_state(pin_a1);
b=input_state(pin_a2);
c=input_state(pin_a3);
d=input_state(pin_a4);
e=input_state(pin_a5);
if(a==1){
lcd_gotoxy(21,1);
printf(lcd_putc,"Inst
Edgar Rosero");
delay_ms(500);
lcd_gotoxy(21,3);
printf(lcd_putc,"Jorge
Celades ");
delay_ms(500);
lcd_gotoxy (21,1);
printf(lcd_putc," ");
delay_ms(500);
lcd_gotoxy (21,3);
printf(lcd_putc," ");
delay_ms(500);//
lcd_gotoxy(21,1);
printf(lcd_putc,"Jorge
Celades ");
delay_ms(500);
lcd_gotoxy(21,3);
printf(lcd_putc,"Cod.:
XX.XXX.XXX ");
delay_ms(500);
lcd_gotoxy (21,3);
printf(lcd_putc," ");
delay_ms(500);
lcd_gotoxy (21,1);
printf(lcd_putc," ");
delay_ms(500);
}
//*******************
if(b==1) {
lcd_gotoxy(21,1);
printf(lcd_putc,"Inst
Edgar Rosero");
delay_ms(500);
lcd_gotoxy(21,3);
printf(lcd_putc,"Luis
Sanchez ");
delay_ms(500);
lcd_gotoxy (21,1);
printf(lcd_putc," ");
delay_ms(500);
lcd_gotoxy (21,3);
printf(lcd_putc," ");
delay_ms(500);//
lcd_gotoxy(21,1);
printf(lcd_putc,"Luis
Sanchez ");
delay_ms(500);
lcd_gotoxy(21,3);
printf(lcd_putc,"Cod.:
16.786.134 ");
delay_ms(500);
lcd_gotoxy (21,3);
printf(lcd_putc," ");
delay_ms(500);
lcd_gotoxy (21,1);
printf(lcd_putc," ");
delay_ms(500);
}
//************
if(c==1) {
lcd_gotoxy(21,1);
printf(lcd_putc,"Inst
Edgar Rosero");
delay_ms(500);
lcd_gotoxy(21,3); printf(lcd_putc,"Gonzalo Nino ");
delay_ms(500);
lcd_gotoxy (21,1);
printf(lcd_putc," ");
delay_ms(500);
lcd_gotoxy (21,3);
printf(lcd_putc," ");
delay_ms(500);//
lcd_gotoxy(21,1); printf(lcd_putc,"Gonzalo Nino ");
delay_ms(500);
lcd_gotoxy(21,3);
printf(lcd_putc,"Cod.:
xx.xxx.xxx ");
delay_ms(500);
lcd_gotoxy (21,3);
printf(lcd_putc," ");
delay_ms(500);
lcd_gotoxy (21,1);
printf(lcd_putc," ");
delay_ms(500);
}
//*****************
if(d==1) {
lcd_gotoxy(21,1);
printf(lcd_putc,"Inst
Edgar Rosero");
delay_ms(500);
lcd_gotoxy(21,3);
printf(lcd_putc,"Carlos Cardona ");
delay_ms(500);
lcd_gotoxy (21,1);
printf(lcd_putc," ");
delay_ms(500);
lcd_gotoxy (21,3);
printf(lcd_putc," ");
delay_ms(500);//
lcd_gotoxy(21,1);
printf(lcd_putc,"Carlos Cardona ");
delay_ms(500);
lcd_gotoxy(21,3);
printf(lcd_putc,"Cod.:
18.415.051 ");
delay_ms(500);
lcd_gotoxy (21,3);
printf(lcd_putc," ");
delay_ms(500);
lcd_gotoxy (21,1);
printf(lcd_putc," ");
delay_ms(500);
}
//*********************
if(e==1) {
lcd_gotoxy(21,1);
printf(lcd_putc,"Inst
Edgar Rosero");
delay_ms(500);
lcd_gotoxy(21,3);
printf(lcd_putc,"Hector
F. Acevedo");
delay_ms(500);
lcd_gotoxy (21,1);
printf(lcd_putc," ");
delay_ms(500);
lcd_gotoxy (21,3);
printf(lcd_putc," ");
delay_ms(500);//
lcd_gotoxy(21,1);
printf(lcd_putc,"Hector
F. Acevedo");
delay_ms(500);
lcd_gotoxy(21,3);
printf(lcd_putc,"Cod.:
xx.xxx.xxx ");
delay_ms(500);
lcd_gotoxy (21,3);
printf(lcd_putc," ");
delay_ms(500);
lcd_gotoxy (21,1);
printf(lcd_putc," ");
delay_ms(500);
}
}
}
|
          
Link Video Youtube: https://youtu.be/G_zQFzyOq70
|
||
Programa en
Lenguage Basic
#Include <16f877.h>
#Device adc=100
#Device *=16
#Use delay (clock=4M)
#Include <lcd.c>
#Fuses xt
'Float Temp;
Private Sub main()
Dim a As int1, b As int1, c As int1, d As int1, e As int1
'variables de
propósito general
'************Inicio
del LCD **********
Lcd_init()
'******inicio lcd
Lcd_gotoxy(1, 1)
Printf(lcd_putc,
"Micro controladores")
Lcd_gotoxy(1, 2)
Printf(lcd_putc, "Col 2 - Gr:309696_21")
delay_ms(500)
'**************************
While True
a = input_state(pin_a1)
b = input_state(pin_a2)
c = input_state(pin_a3)
d = input_state(pin_a4)
e = input_state(pin_a5)
'**********Logica
If a = 1 Then
lcd_gotoxy(21, 1)
printf(lcd_putc, "Inst Edgar Rosero")
delay_ms(500)
lcd_gotoxy(21, 3)
printf(lcd_putc, "Jorge Celades ")
delay_ms(500)
lcd_gotoxy(21, 1)
printf(lcd_putc, " ")
delay_ms(500)
lcd_gotoxy(21, 3)
printf(lcd_putc, " ")
delay_ms(500)
lcd_gotoxy(21, 1)
printf(lcd_putc, "Jorge Celades ")
delay_ms(500)
lcd_gotoxy(21, 3)
printf(lcd_putc, "Cod.: XX.XXX.XXX ")
delay_ms(500)
lcd_gotoxy(21, 3)
printf(lcd_putc, " ")
delay_ms(500)
lcd_gotoxy(21, 1)
printf(lcd_putc, " ")
delay_ms(500)
End If
'*******************
If b = 1 Then
lcd_gotoxy(21, 1)
printf(lcd_putc, "Inst Edgar Rosero")
delay_ms(500)
lcd_gotoxy(21, 3)
printf(lcd_putc, "Luis Sanchez ")
delay_ms(500)
lcd_gotoxy(21, 1)
printf(lcd_putc, " ")
delay_ms(500)
lcd_gotoxy(21, 3)
printf(lcd_putc, " ")
delay_ms(500)
lcd_gotoxy(21, 1)
printf(lcd_putc, "Luis Sanchez ")
delay_ms(500)
lcd_gotoxy(21, 3)
printf(lcd_putc, "Cod.: 16.786.134 ")
delay_ms(500)
lcd_gotoxy(21, 3)
printf(lcd_putc, " ")
delay_ms(500)
lcd_gotoxy(21, 1)
printf(lcd_putc, " ")
delay_ms(500)
End If
'********************************
|
If c = 1 Then
lcd_gotoxy(21, 1)
printf(lcd_putc, "Inst Edgar Rosero")
delay_ms(500)
lcd_gotoxy(21, 3)
printf(lcd_putc, "Gonzalo Nino ")
delay_ms(500)
lcd_gotoxy(21, 1)
printf(lcd_putc, " ")
delay_ms(500)
lcd_gotoxy(21, 3)
printf(lcd_putc, " ")
delay_ms(500)
lcd_gotoxy(21, 1)
printf(lcd_putc, "Gonzalo Nino ")
delay_ms(500)
lcd_gotoxy(21, 3)
printf(lcd_putc, "Cod.: xx.xxx.xxx ")
delay_ms(500)
lcd_gotoxy(21, 3)
printf(lcd_putc, " ")
delay_ms(500)
lcd_gotoxy(21, 1)
printf(lcd_putc, " ")
delay_ms(500)
End If
'************************************
If d = 1 Then
lcd_gotoxy(21, 1)
printf(lcd_putc, "Inst Edgar Rosero")
delay_ms(500)
lcd_gotoxy(21, 3)
printf(lcd_putc, "Carlos Cardona ")
delay_ms(500)
lcd_gotoxy(21, 1)
printf(lcd_putc, " ")
delay_ms(500)
lcd_gotoxy(21, 3)
printf(lcd_putc, " ")
delay_ms(500)
lcd_gotoxy(21, 1)
printf(lcd_putc, "Carlos Cardona ")
delay_ms(500)
lcd_gotoxy(21, 3)
printf(lcd_putc, "Cod.: 18.415.051 ")
delay_ms(500)
lcd_gotoxy(21, 3)
printf(lcd_putc, " ")
delay_ms(500)
lcd_gotoxy(21, 1)
printf(lcd_putc, " ")
delay_ms(500)
End If
'********************************
If e = 1 Then
lcd_gotoxy(21, 1)
printf(lcd_putc, "Inst Edgar Rosero")
delay_ms(500)
lcd_gotoxy(21, 3)
printf(lcd_putc, "Hector F. Acevedo")
delay_ms(500)
lcd_gotoxy(21, 1)
printf(lcd_putc, " ")
delay_ms(500)
lcd_gotoxy(21, 3)
printf(lcd_putc, " ")
delay_ms(500)
lcd_gotoxy(21, 1)
printf(lcd_putc, "Hector F. Acevedo")
delay_ms(500)
lcd_gotoxy(21, 3)
printf(lcd_putc, "Cod.: xx.xxx.xxx ")
delay_ms(500)
lcd_gotoxy(21, 3)
printf(lcd_putc, " ")
delay_ms(500)
lcd_gotoxy(21, 1)
printf(lcd_putc, " ")
delay_ms(500)
End If
End While
End Sub
|
||
PROYECTO
CALDERA:
v Metodología
v Inicio de fase del Algoritmo
v Esquema General
v Análisis de resultados
v Recursos a utilizar.
CONCLUSIONES
v Los micros controladores PIC son
fáciles de programar. Un PIC se puede grabar mediante diferentes puertos como
serie o el USB.
v La ventaja de los PIC permite
controlar, programar y sincronizar tareas electrónicas a través del tiempo
simplemente realizando una correcta programación.
v En el pasado no era posible
controlar cada proceso era necesario un circuito muy complicado y específico
para cada cosa que se necesite. Con Microcontrolador PIC hace todo.
v Existen software que ayuda a
programar Microcontrolador y están muy extendidos y difundidos.
v Gran diversidad de micros
controladores PIC es una ventaja, elige entre características como cantidad de
puertos, cantidad de entradas y salidas, conversor Analógico al Digital,
cantidad de memoria, espacio físico, y permiten tener una mejor elección de un
PIC.
v Desventajas Microcontrolador PIC
necesitan muchas instrucciones para una tarea cuando el proyecto es complejo.
BIBLIOGRAFIA
v
http://www.absorsistem.com/tecnologia/calderas/descripci%C3%B3n-de-calderas-y-generadores-de-vapor
No comments:
Post a Comment